Na tarde desta terça feira (01/11/2016) nosso grupo participou da competição final do Robô Gladiador. Nosso grupo atingiu um bom resultado, que nos deixou satisfeitos.
Nosso primeiro duelo aconteceu com o grupo 5 da nossa sala, 3°C, e conseguimos vencê-los, após pouco segundos nosso robô estourou a bexiga deles. Em seguida, duelamos com o grupo 9, também da nossa turma, e novamente vencemos, igualmente na vez anterior. No terceiro duelo, porém, fomos derrotado pelo grupo 10 do 3°B, tal duelo demorou mais, já que no inicialmente nenhum robô atacou ao outro (se aproximou), tivemos que iniciar novamente o duelo das posições iniciais, porém tivemos nossa bexiga estourada pelo outro robô, e nessa etapa infelizmente deixamos a competição.
Nosso primeiro duelo aconteceu com o grupo 5 da nossa sala, 3°C, e conseguimos vencê-los, após pouco segundos nosso robô estourou a bexiga deles. Em seguida, duelamos com o grupo 9, também da nossa turma, e novamente vencemos, igualmente na vez anterior. No terceiro duelo, porém, fomos derrotado pelo grupo 10 do 3°B, tal duelo demorou mais, já que no inicialmente nenhum robô atacou ao outro (se aproximou), tivemos que iniciar novamente o duelo das posições iniciais, porém tivemos nossa bexiga estourada pelo outro robô, e nessa etapa infelizmente deixamos a competição.
Mesmo sendo eliminado nesta "3° fase" foi muito bom e legal participar da nossa última competição de Iniciação Tecnológica.
Foi informado nesta tarde a nós que na próxima semana haverá em cada sala competições regionais. Nos prepararemos para atingir bons resultados em nossa sala.
Vale ressaltar que o integrante quem pilotou o robô foi o Rogers.
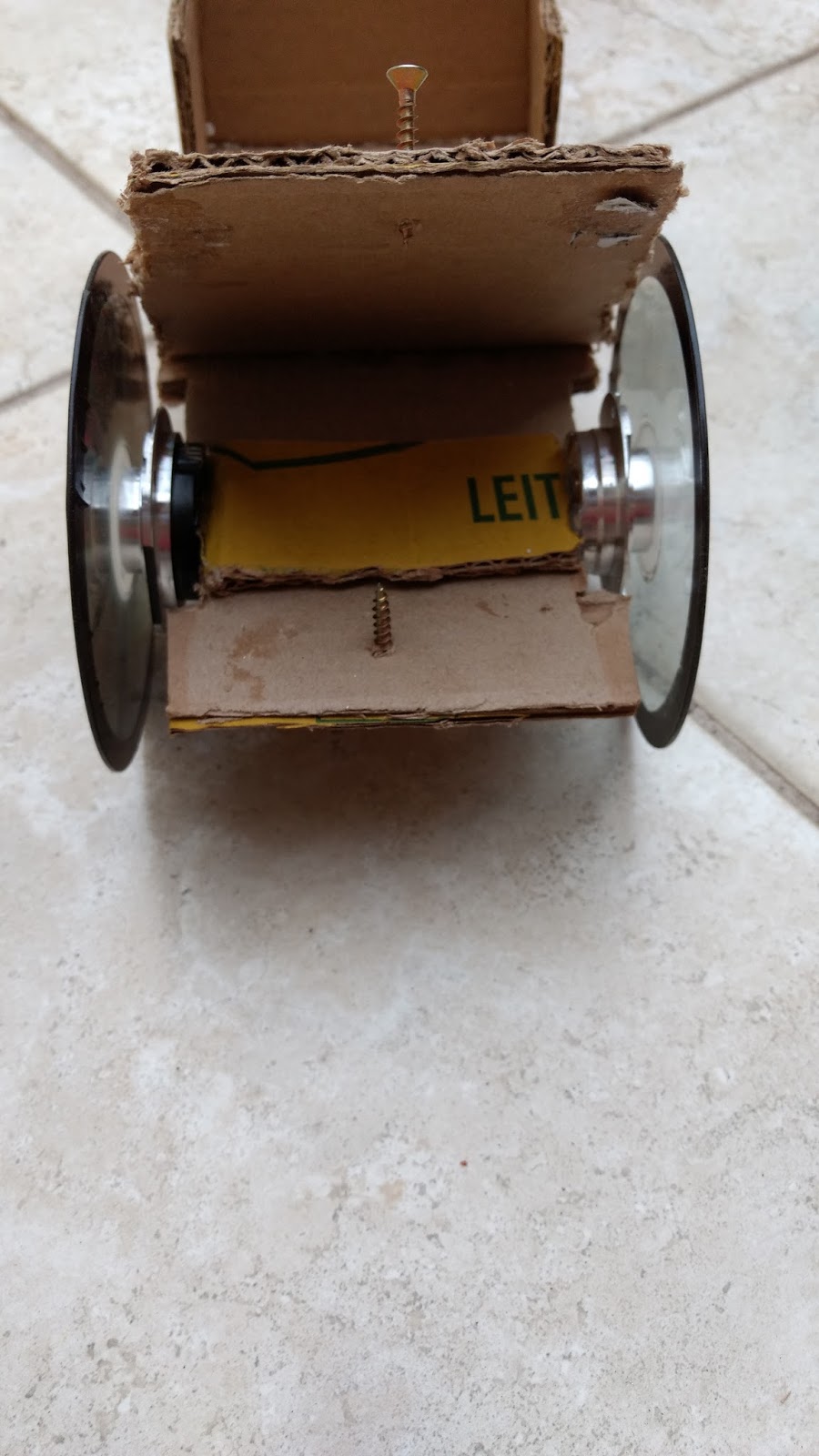
Outro fato que devemos mencionar, após o fim da aula e antes de começar a competição (14 h), nosso grupo instalou as seringas no escudo do robô, as quais são responsáveis por estourar a bexiga dos adversários, as instalamos apenas hoje por motivos de segurança. Elas foram coladas com fita crepe, e não foi necessário colocá-las juntamente a palitos de churrasco. Decidimos também "reforçar" os motores, desejando que eles não se soltassem, para isso colamos fitas isolante sobre eles.
A seguir, nas fotos podem ser percebidas as "alterações" mencionadas.